Robot Gripper Design
Robot Gripper Design - The gripper fingers optimize this effect to create a preferred bending direction, producing a better and stronger grip on an object. The repetitive trapezoid facets lead to the simple design of geometric parameters for customization and stable linear movement ( figure 41 ). Universal robotic gripper based on the jamming of granular material. Web this article reviews the literature on the design of robotic mechanical grippers, with a focus on the mechanical aspects, which are believed to be the main bottleneck for effective designs. Web additive manufactured grippers transform robotics. Web smw electronics, a new division of smw autoblok, launched a new line of grippers — motiact — to automate key processes for industrial and electronic applications including machine tools, material handling, inspection, assembly, and more. Web in this phd thesis, we focus on the design, analysis, and development of adaptive, underactuated, and soft robot grippers and hands that can provide robust grasping and dexterous manipulation capabilities to robotic systems operating in dynamic and unstructured environments. Web mechanical design for robot gripper. Web collaborative robot gripper design, development: Web robotic grippers have many amazing uses. We model the design objectives by training a fitness network to predict their values for pairs of gripper fingers and their corresponding grasp. Annan mozeika, erik steltz, mitchell r zakin, hod lipson, and heinrich m jaeger. Our discussion includes gripper architectures and means of actuation, anthropomorphism and grasp planning, and robotic manipulation, emphasizing the. Web as robotic systems become more. The repetitive trapezoid facets lead to the simple design of geometric parameters for customization and stable linear movement ( figure 41 ). Web mechanical design for robot gripper. Web we propose fit2form, a 3d generative design framework that generates pairs of finger shapes to maximize design objectives (i.e., grasp success, stability, and robustness) for target grasp objects. In total, 37. Grippers are a common end effector in robotics, but they can be a challenge to design. The proposed actuator has one dof linear translation along its axis. The repetitive trapezoid facets lead to the simple design of geometric parameters for customization and stable linear movement ( figure 41 ). Web robotic grippers have many amazing uses. Web but with the. New designs minimize pinch points, reduce weight, cover sharp edges, and limit robot force. Web smw electronics, a new division of smw autoblok, launched a new line of grippers — motiact — to automate key processes for industrial and electronic applications including machine tools, material handling, inspection, assembly, and more. Web we propose fit2form, a 3d generative design framework that. Manufacturers can now integrate lightweight design principles into gripper fabrication processes using additive manufacturing to create grippers that are both sustainable in their production as well as in their application by reducing energy use. Many new robots with gripper tools are cobots that utilize design strategies that improve ease of use and work safety. Web in this phd thesis, we. Web engineers typically use a few key steps to design robotic grippers, from concept to final production. Given a target grasp object, the algorithm generates the 3d geometry of a pair of fingers for a parallel jaw gripper that maximizes the design goals (e.g., grasp success, stability, and robustness). Web but with the right knowledge you can create the perfect. Our discussion includes gripper architectures and means of actuation, anthropomorphism and grasp planning, and robotic manipulation, emphasizing the. Web additive manufactured grippers transform robotics. New gripper design should be adapted to Annan mozeika, erik steltz, mitchell r zakin, hod lipson, and heinrich m jaeger. Engineers work through a detailed planning process before any prototyping or mockups. Web emika panda robot arm with a parallel gripper [21], which in total has seven degrees of freedom. For more about this article see link below. Web robotic grippers have many amazing uses. Universal robotic gripper based on the jamming of granular material. Engineers work through a detailed planning process before any prototyping or mockups. Soft origami gripper with variable effective length. The proposed actuator has one dof linear translation along its axis. In this article, we will walk you through the process, from choosing your gripper's method of actuation to testing your final design. Web smw electronics, a new division of smw autoblok, launched a new line of grippers — motiact — to automate. The reason to get into robot gripper design in the first place Given a target grasp object, the algorithm generates the 3d geometry of a pair of fingers for a parallel jaw gripper that maximizes the design goals (e.g., grasp success, stability, and robustness). Engineers work through a detailed planning process before any prototyping or mockups. In general, there are. New gripper design should be adapted to Web additive manufactured grippers transform robotics. Grippers are a common end effector in robotics, but they can be a challenge to design. Web emika panda robot arm with a parallel gripper [21], which in total has seven degrees of freedom. We model the design objectives by training a fitness network to predict their values for pairs of gripper fingers and their corresponding grasp. Web the article presents the design of the gripper, some basic kinematics to describe its function, and then experimental results demonstrating the ability to adjust the bending stiffness of the gripper's fingers. Soft origami gripper with variable effective length. Manufacturers can now integrate lightweight design principles into gripper fabrication processes using additive manufacturing to create grippers that are both sustainable in their production as well as in their application by reducing energy use. Web we propose fit2form, a 3d generative design framework that generates pairs of finger shapes to maximize design objectives (i.e., grasp success, stability, and robustness) for target grasp objects. The gripper fingers optimize this effect to create a preferred bending direction, producing a better and stronger grip on an object. Web a gripper is a mechanical or robotic device designed to grasp, hold, manipulate, or transport objects. Watch as our robot specialist discusses the keys for creating a functi. Universal robotic gripper based on the jamming of granular material. Four trends you need to know. Annan mozeika, erik steltz, mitchell r zakin, hod lipson, and heinrich m jaeger. Web we propose fit2form, a 3d generative design framework that generates pairs of finger shapes to maximize design objectives (i.e., grasp success, stability, and robustness) for target grasp objects.
Introduction To Designing Robot Gripper Finger Tooling GripShape

Onshape Project Robot Gripper Step 1 = Overview of Top Down Design
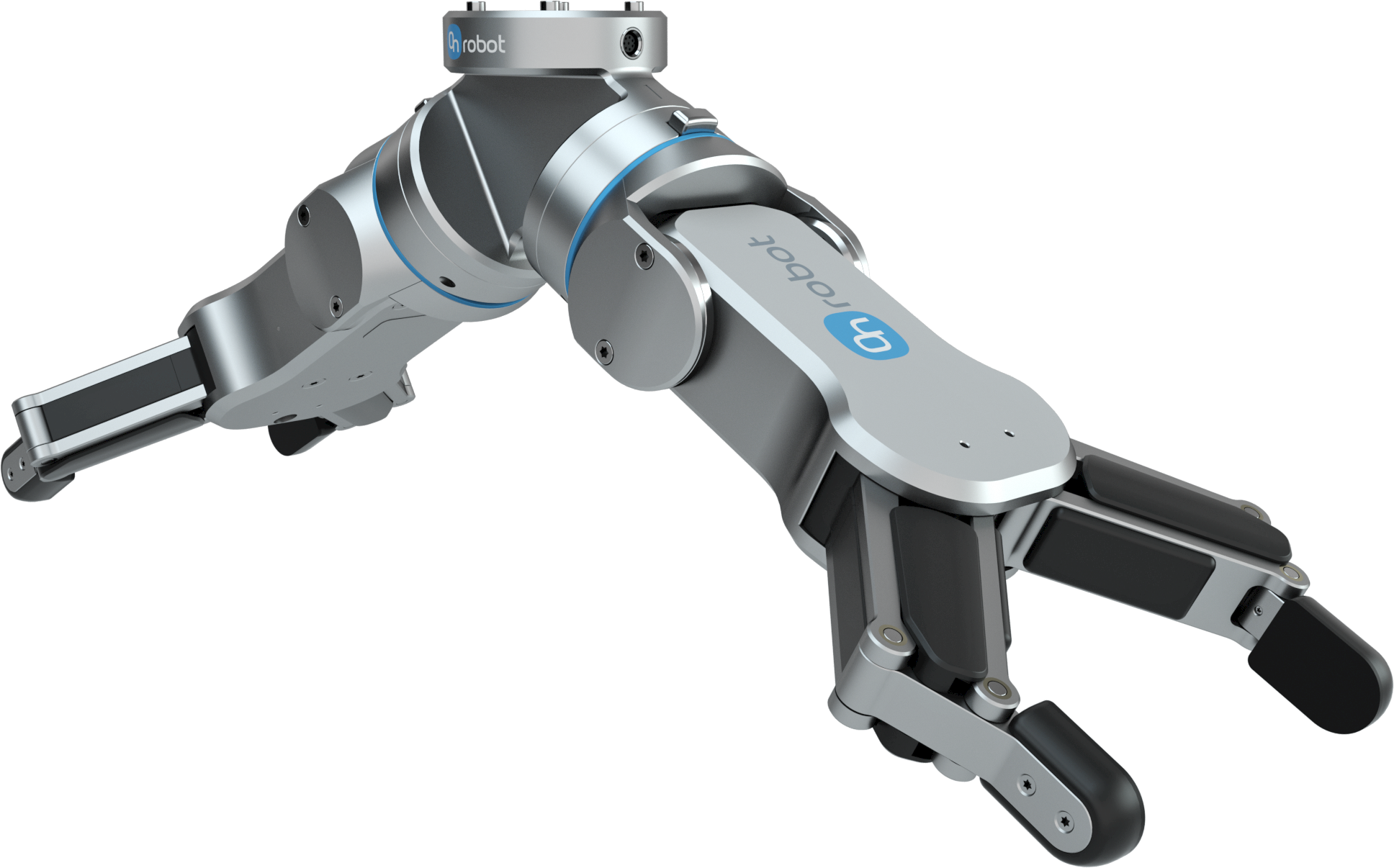
Onrobot RG6 Flexible 2 Finger Robot Gripper With Wide Stroke PBA

Robotic gripper mechanism robotic gripper design solidworks
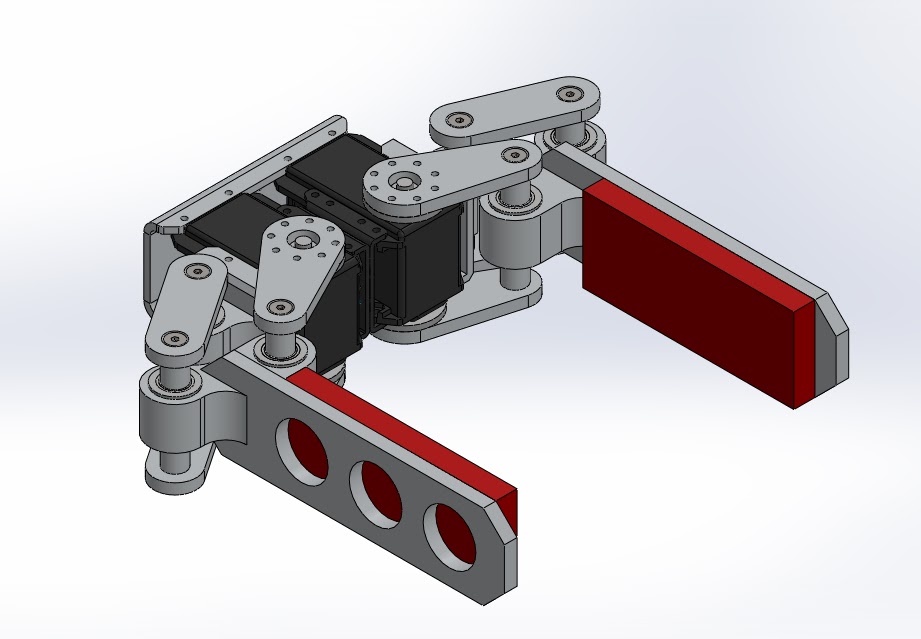
311. 4Bar Linkage Gripper (with Dynamixel RX64) Educational
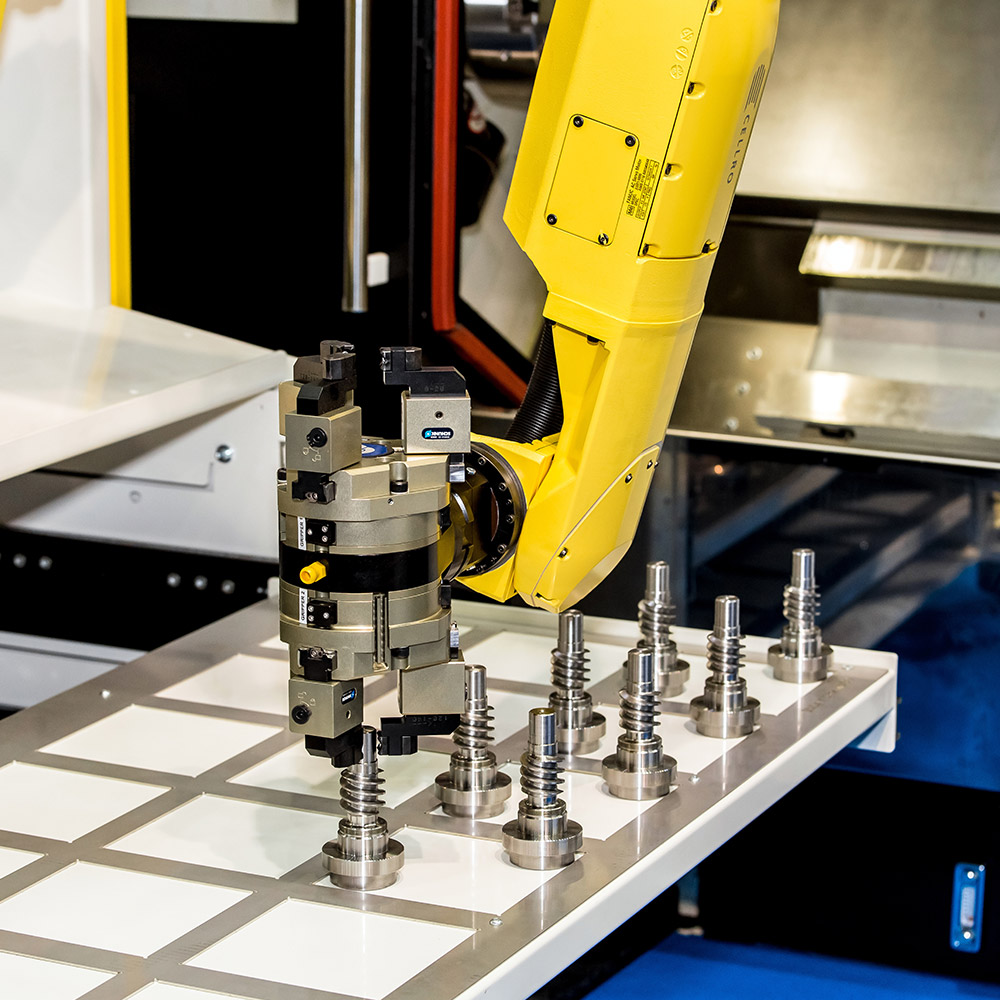
Robot Gripper Design & Fabrication Buildtech System

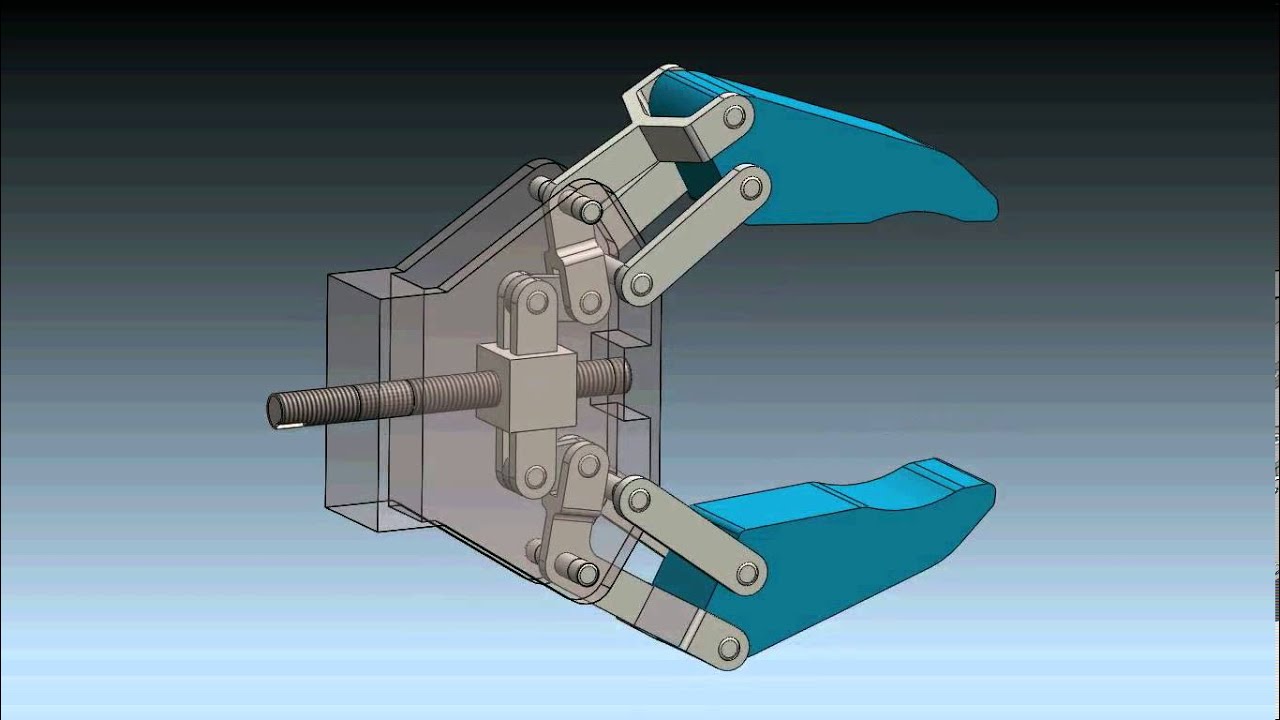
Robot Gripper Mechanism Using Screw Mechanical Mechanism Animation

Mechanical design for robot gripper Download Scientific Diagram

Robot Gripper Improvements Robot gripper, Mechanical design, Robot design
Robot Gripper Mechanism in SolidWorks 2012 YouTube
In Total, 37 Jaw Surface Design Variations Were Created Using 3D Printed Casting Molds And Silicon Rubber.
In General, There Are Three Types Of Robot Gripper Designs;
Chen B, Shao Z, Xie Z, Et Al.
In This Article, We Will Walk You Through The Process, From Choosing Your Gripper's Method Of Actuation To Testing Your Final Design.
Related Post: